
Over and over again, on various online forums, social media platforms, and in the local gun shops. We hear people constantly say, “If company X made product Y, I’d buy it!”
Right now, I constantly hear that in regard to Smith & Wesson and their M&P Series. Folks are harping about how Big Blue should make a 10mm M&P. They all claim it’d sell like hotcakes and they’d buy one in a minute.
Well, the truth is, that’s hardly ever really the case. Colt in the 1990s is a prime example of that.
Cowboy Action Shooting was really starting to explode in the mid 1990s and Colt was producing their ever-classic Single Action Army. But shooters wanting to get into the game constantly complained about the price of the Colt SAAs along with their delicate lockwork.
These people continually harped to Colt’s customer service department, repeating the same message; “Why don’t you guys make a gun like the Ruger Vaquero? It’s more affordable and more reliable!”
So Colt, which wasn’t doing well financially at the time, gave in to what the consumers demanded. They made a Ruger Vaquero clone.
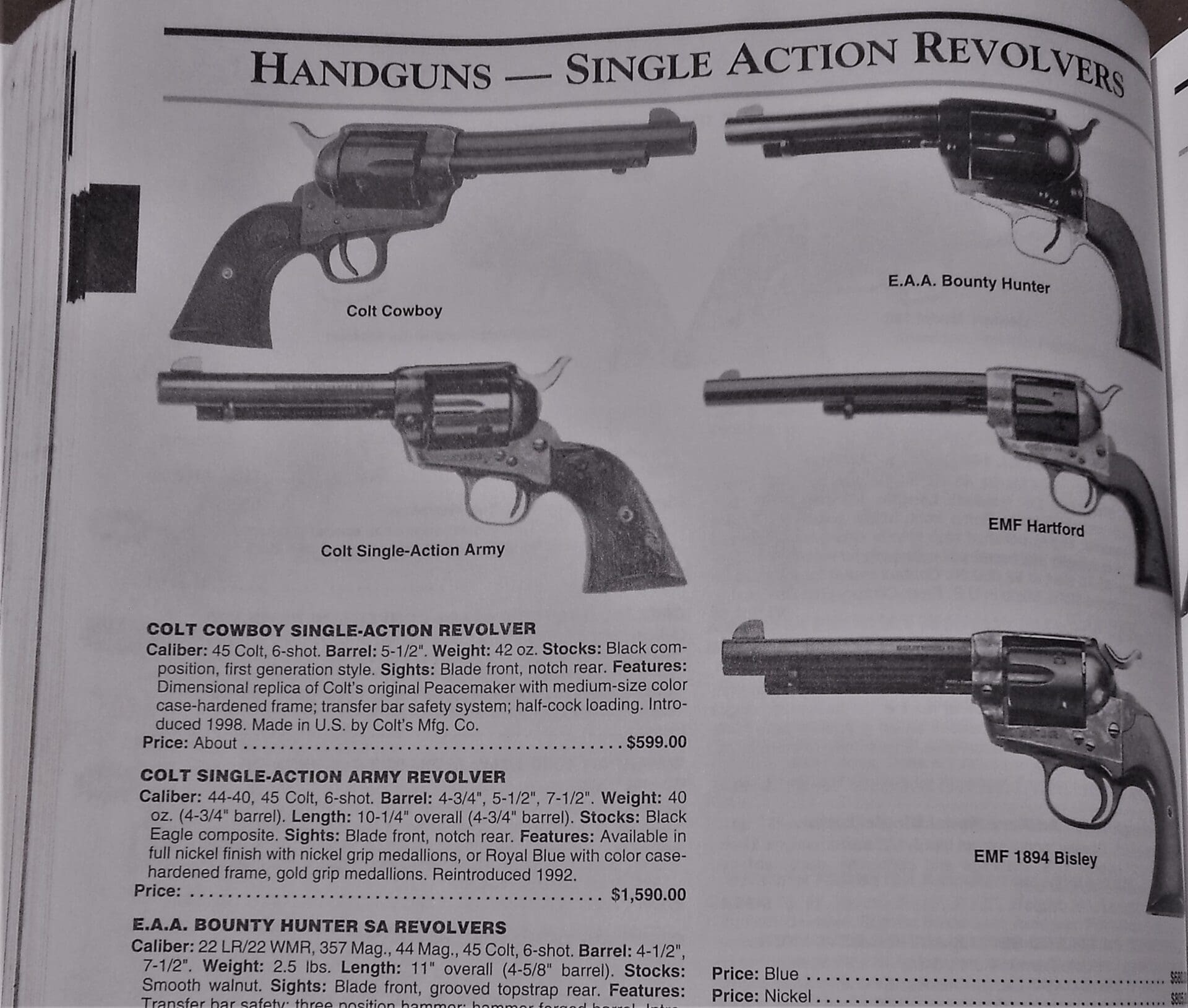
In 1998, they released the Colt Cowboy. It was a modern production revolver that had all the same features as the Ruger including different and stronger lock work, a transfer bar safety, investment cast receiver instead of the forged frame from the past and more.
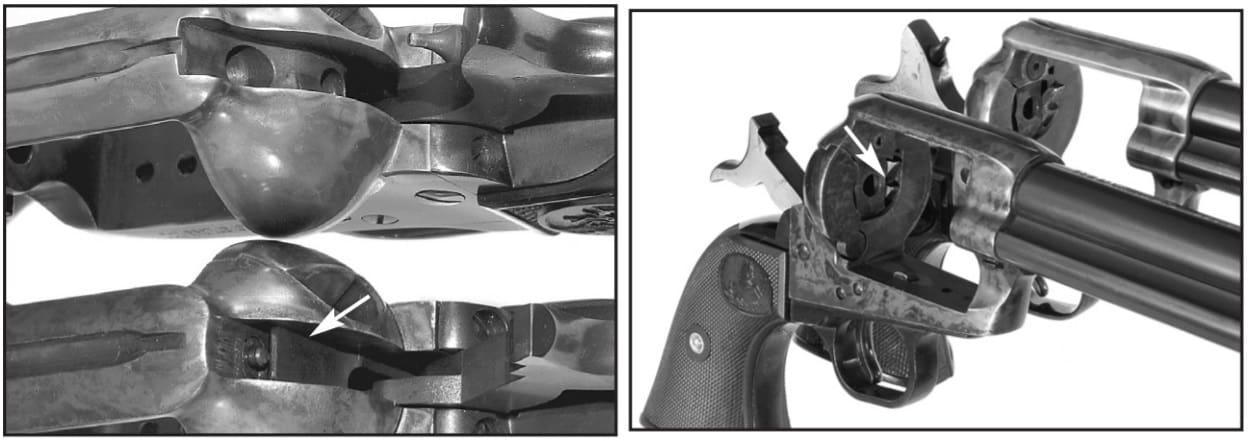
As you can see in photos from Colt’s original press release, the Cowboy has a frame mounted firing pin, transfer bar safety, and different lock work to move the cylinder.
The gun was priced to be competitive with the Ruger Vaquero, too.
It was exactly what the consumer asked for. A Colt-made clone of the Vaquero with all of the Vaquero’s features, but a revolver that said “Colt” and featured the prancing pony.
It was also a dismal failure in the market.
All of the people who swore they’d buy one never did. The gun languished on store shelves and finally, in 2003, Colt took that pony to the back pasture and put it out of its misery.
There was nothing particularly wrong with the Colt Cowboy. It was in every sense, a better revolver than the original Single Action Army. It was better built, had better lock work, and was more affordable. Plus, you could safely carry six rounds in the cylinder and and not have to worry about a negligent discharge if the revolver was dropped.
Yet all of those people who complained that the SAA was too expensive complained that the Cowboy “wasn’t a real Colt.” The common gripe I hear with anything that isn’t a “true” Colt or a Colt clone (like the Uberti guns) is that they don’t have the four clicks from when the hammer is cocked. Folks claim that the four clicks spell out “C-O-L-T” and that’s how you know you have yourself a real Colt.
Those people complained that Rugers weren’t legit since they didn’t have the four clicks and the Cowboy was a fraud, too since it only had three.

The Cowboy was, in every sense, a real Colt. And it was a good revolver. The problem was that Colt listened to the consumer and the consumer is a fickle beast.
Sometimes, the consumer isn’t right. The hard part is knowing when.



Unfortunately I had one, worked on others. They were bad to go out of time. Uberti guns came in cheap versions and better versions pretty good guns today.
I hope the author continues to write and sends more to TTAG
Could you please describe what ‘out of time’ meant, and what was required to correct it (if possible)…
I assume revolvers have to be set so the firing chamber aligns with the barrel as the cylinder is rotated by the hammer mechanism.
Maybe the cylinder was “out of time” meaning it didnt line up perfectly with the barrel? If not that then I have no clue
The crane has to rotate the cylinder as the trigger is pulled and line up the next round then lock in place just before the hammer locks back.
This is what they call timing a revolver. it’s getting the pieces to play together.
Sometimes out of time revolvers will have cylinder bores not in line with the barrel and will strip bits of bullet at the forcing cone or miss totally and destroy the firearm. The crane may not catch the lockwork and skip over, which wont rotate the cylinder and you get a dead fire.
The cylinder lock is often loose and wont line up the cylinder.
Rugers are bad for getting the mechanisms inside bound tight if you half squeeze one off and let off, then try to pull again, it shoves it out of time and can lock up.
A Colt single action revolver has no crane. What you are talking about is the bolt. The bolt is what locks/stop cylinder rotation when the chamber is in line with the bore. The hand rotates the cylinder.
A crane is used in double action revolvers, typically at the front of the cylinder, it is the mount for the cylinder and allows the cylinder to swing out for unloading/reloading.
The HAND or PAWL is what rotates the cylinder. A single-action revolver doesn’t (typically) have a crane. OUT OF TIME means that the HAND pressing against the RATCHET on the cylinder’s rear does not rotate the cylinder to the full lockup point where the locking bolt engages the cylinder keeping it in place. It can also mean OVER ROTATION where you can’t even get the gun cocked. When the cylinder and barrel don’t align properly at lockup, You have a problem with CYLINDER TO BARREL ALIGNMENT.
Cylinder does not lock in place like it should
As I recall, they ended up being higher priced than the Vaquero.
They were pretty scare in the south. Or at least MS and AL.
They were also not finished as nicely as the SAA.
On top of that, USPFA had the Rodeo – I think that was cheaper. Also not as nicely finished.
Turns out – what people really wanted was two different things. A SAA at a much lower price (don’t hold your breath) and a more slim Vaquero with original XR3 grip frame.
Truth is …. Colt struggled to make good guns that people could afford. High end stuff doesn’t pay the bills when your competition is making very good guns at a better price point.
Ruger sometimes listens to their customers. When they do , they are usually rewarded.
Colt should have closed the doors years ago. It finally caught up to them. Too little too late.
They weren’t priced the same. They were higher.
I was managing a gun store as well as a member of S.A.S.S. when Colt released the Cowboy. Yes, Colt did listen to customers- but what they delivered was only a vaquero “in theory”. In practice (common Colt practice, unfortunately) the Cowboy was not as solid as a Ruger- nor was it priced competitively.
We were lucky to sell one Cowboy to every tenth customer who came in to look at one. The typical response was “Well, I guess it’s OK… but, seems like I’m paying more and getting less than a Vaquero.”
Then, after the rumors of “frailty” started spreading it was game over for the Cowboy. So, in my opinion it wasn’t that Colt failed by giving customers what they wanted- Colt failed by giving customers a typical Colt.
This rumble down a rutted memory lane has rattled some rust loose in my beleaguered brain. I seem to recall the “frailty” issues began after a story started circulating about some kind of media intro where the guns Colt provided experienced failures during the event (that would guarantee some bad juju). The “timing” issue also rings a bell, but I think that might have surfaced later.
There was also wide-spread speculation about where Colt sourced the cast frames. Back then, Ruger was the only firearms manufacturer thought capable enough to make trustworthy investment cast gun parts (it was their specialty, after all). I think there were even rumors that Ruger was doing the castings for them, or maybe even some Canadian company. Again- bad juju.
Bottom line: if you bring a new model to market that is met with rumors of fragility, questions about whether your competitor (or foreign country) is helping you make it, and it’s priced above the competition… that’s a textbook recipe for disaster.
Ruger was wildly successful making a ” ‘better’, more bang-for-your-buck” copy of a Colt six shooter. Unfortunately, Colt was painfully unsuccessful in their attempt to return the favor by making a copy of a Ruger Vaquero.
If you think about it… it just makes sense. Want a “real” Colt? It ain’t gonna be cheap. Want a modern peacemaker that’s safe, damn-near indestructible, and a great value? Buy a Ruger Vaquero. Want a sub-standard Ruger clone priced at a premium because it says “Colt” on it? Anyone? Anyone? Um, yeah… not seeing a lot of hands raised, huh?
Bingo. Doesn’t really seem fair to place the blame on the “customers” now, does it?
That’s how my hazy memory recollects it, anyway.
Cheap, quick, good. Pick any TWO!
The Cowboy was met with a great deal of unfair judgment. I was around several and I never did see a problem. The steel was far superior to what a Uberti offered. The design was solid enough. All of that “Real Colt” business is a waste of perfectly good air. Sadly, while the internet brings plenty of “good” to us, it’s also become a proverbial soapbox for “experts” who lack any real Real REAL experience to throw opinions around as facts. I see it constantly. The Cowboy’s biggest problem could typically be found with the Keyboard Warriors.
Its is (or should be by now) a well known marketing axiom: Dont ask the consumer what they want, ask them what they think that their neighbors want.
See also: Ford Edsel, a dismal marketing failure. https://en.wikipedia.org/wiki/Edsel
What people say they want is X, but what they really want is to be able to tell their neighbors that they one-upped them.
A better example is the Pinto and Vega. American companies said OK the consumer wants small economical vehicles. Lets make one. And quickly became known for little trashboxes that fell apart.
The 302 with cleveland heads did fit nicely in the Pinto and with the front and rear frame tied together was a pretty interesting toy. Still remember the look on the 240Z driver when he caught back up with me at the next light and him asking what the hell is in that thing. Was nice having friends who were into sprint cars .
Bet ya did’nt know Jews could be into cars too did ya.
Better yet example if you’re old enough to recall would be Ford’s Edsel series of cars ca 1958-60. Much pre-marketing research and hoopla, not so good in the sales category.
BTW- Colt had another loser in the mid 80s trying to break into the DA auto pistol market- the “Double Eagle”. Basically a 1911 .45 ACP top on a new, full sized double action frame. Lots of fanfare. Got mine afterwards when CDNN was selling the unsold new ones for a couple hundred bucks. Not the best of both worlds. Should do a “review” on it some time…
Ian did. It looked like a proof of concept prototype with all the thin and small parts.
The guy who does the gunsmithing videos calls it a Beagle.
I carried a .45 ACP MK II Series 90 Commander for years both open strong side (daily while managing the gun shop) as well as concealed (FL CWP) back in the mid/late 90’s.
I had 100% confidence in that gun (sincerely wish I still had it). The Double Eagle MK II amended the grip panel “parts retention” issue that some experienced with the MK I.
If we’re going to play “pin the tawdry on the deficient”… then we need to talk about Colt’s All American 2000. Now there’s a train wreck that was particularly painful to witness.
And it was impossible to look away…
My mom had a used Vega and she would pick us up after school along with 12 of our closest friends. Seat belts were not a thing, and she smoked like a chimney.
How did any of us survive childhood?
Hence the rush to buy the latest 9mm wondernine.
And here I thought companies making bad decisions based on perceived customer demands was a new thing. Maybe the advent of Twatter and Zuckbook have just exacerbated the phenomenon.
Very similar to the “market research” being done by Harris/Biden and the progressives concerning the demise of the Second Amendment and privately-owned firearms. Try as they may, the “sales”are not supporting their research and even a large number of “new” gun owners on the left aren’t buying it. Now, if we can keep from turning them and the majority of Americans off and against us with crazy rhetoric and actions we might weather this pretty well.
People don’t know what they want, or if they even want it. Modern marketing tells people what they want. The mountains of crap sold in this world that ends up in a landfill after a year is proof of that.
Sure they do, if one ties “wishes” with pre-order cash. Now that’s a poll…
Colts are too expensive when you can buy any variety of clones by Uberti which are made to better tolerances with better metals than the originals. I have a Taylors tuned Smoke Wagon 4109DE and it is just a stunner. I like to buy American and do when I can but in this day and age sometimes it’s just not possible. It’s like trying not to buy any China crap. The sad fact is it’s just about impossible anymore to NOT end up buying China at some point.
I personally am not too fond of the Uberti chemical “case hardening” look, as it substantially lacks in color on all the models I have seen. I have thus leaned towards the Piettas, which are much prettier and built just as well. To be clear, however, both are often slapped together on a production line and usually benefit from a little bit of fine tuning. The competition models are much better tuned, but come at a price premium approaching the cost of the Ruger.
Another interesting aspect of the clones is that Pietta went with a Ruger style transfer bar for a while, while Uberti designed a “floating” firing pin that locks up when the hammer is fully cocked but is free floating when the hammer is down. Pietta has recently adopted that (or a similar) system which makes the guns look like the old Colts.
@ Mark N.
What you say is true as far as that case hardened look. But I cheated just a little. When I ordered my 4109DE, I called Taylors and found out they don’t have any tuned 4109DEs on the shelf ready to ship, they have to go grab a standard non-tuned one off the shelf, have their gunsmith tune it, then ship it to my FFL. So they looked through a few boxes and got one that had really nice coloring. I cheated!!! I had already researched things for a LOOOOOOOOOONG time before I settled on a SAA. I had heard of complaints matching what you touched on.
That’s why I said mines a “stunner”
Well, I’d hope 21st Century machining and metallurgy could trump that from say, 1873 since you’re talking about “the originals”. Otherwise, however, I’m very happy with my Colt SAs and only a moron would swap one for an Uberti. Wanna swap?
Good article. I can’t stand the “ooo make it in 10mm” or “glock mags” crowd. No one buys 10mm. It’s a great round, but get over it. No one buys it and most of the people saying they’ll buy one either:
A: already have a 10mm and probably won’t buy another.
Or..
B. Don’t have a 10mm and won’t buy one, they just want to seem cool online.
And glock mags, although they work fine in a pistol, are a terrible idea for a PCC for the same reason the MP40 had terrible magazines.
But the MP40 was better than the STEN. I’ve seen photos of Britsh troops using captured MP40s as late as the mid-1960s.
And the Owen trumps all the WW2 SMGs, including the Thompson. The Owen would run in any and all conditions where the in the Pacific
the Thompson had to be wrapped in oily rags.
The MP40 was a good gun. Much better then the STEN. It’s just the magazine. The double stack single feed idea is fine for a pistol but isn’t a great idea for a full size magazine for something like an SMG. The STEN also used this poor idea for a magazine. Some habits just die hard.
Lanchester 50rd stick magazines would work perfectly in the STEN, but the Lanchester was an old school first gen SMG. The STEN was a crude clone, but understandable in context with the history.
I’ve had an MP-40 for years and its a shooter. Very rare occurrence that I have a problem with the magazine. Most have new springs and the inside of the mag is cleaned every several years. A minuet dab of CLP on the follower where it contacts the mag wall and they are good to go.
I agree that double feed mags are the way to go for a SMG/PCC, but I don’t think it’s fair to point to the STEN magazine as the pinnacle of single feed magazine design. The entire gun was a cheap POS that was just barely good enough to mostly get the job done. A quality PCC with a well made single feed mag will be much more reliable than a STEN.
“…And glock mags, although they work fine in a pistol, are a terrible idea for a PCC..”
Glock mags, including 33 round ones from Korea, work perfectly fine in Ruger’s PCC 9mm.
Designed that way.
I still think someone needs to make a shield size 5.7 carry gun. I MIGHT buy one… Maybe.
I’m waiting for a derringer sized 7 x 57 caliber.
You can get a derringer in .45-70.
Concealed in a belt buckle?
Holy shit! Is it smaller than a 1911?
I don’t remember seeing one at any price and no dealer pushed them in my AO. I had a three screw Black Hawk .357 had the smaller frame that I liked anyway. The big NM Blackhawk 7.5 inch in .45/.45ACP needed the weight. Italian clones worked well for me.
I once had a Colt 1900 .32-20. I used it for years.
The cylinder failed to revolve when I cocked the hammer.
It would revolve if I held the gun up but not held down.
The hand had broken. I wrote Colt and told them a Colt should last more than one hundred years. LOL they sent me a new hand. I have a 1892 .45 what I really wanted now. The Cowboy problems were not rumors. They faded fast in Cowboy Action shooting.
Funny when old guys remember the real facts isn’t it ? Not some colt version of the story
Let’s see how well CZ manages things. Maybe we’ll get a good firearm at a competitive price.
Bought a 1975 .357 Colt SAA three years ago for $500. Yeah, the grips were missing, some of the bluing’s a bit ‘faded’, and I’m told most prefer these in.45 cal. But I got a set of original grips, it’s not a rusty, pitted lump, and it takes the same ammo as my other revolvers. So I’m happy!
M.D.
You did good!
After reading this article I looked these up on Gunbroker. Apparently the Colt name overcomes any questions about durability; the few I found are asking a hefty price. The fit and finish appears to be mediocre. What I found strange was if the pistol has a transfer bar system, why does it also have a two groove arbor pin for a Swiss safety? It makes me wonder if these “Colts” weren’t made in Italy and they were shipped with the pins all the other Uberti/Pietta production got.
Interesting point Jim.
Yep and 30 years ago American stood for the national anthem!
I owned one once. From what I recall the finish was subpar. And weren’t they made in Canada?
Also they didn’t take Glock mags. 🙂
Well the Consumer has been wanting a Python ever since Colt closed the line down. I wonder how the new Python is doing? Hopefully better than the Cowboy did…
Test question: Wasn’t this about the same time that Dave Donnelly started up U.S. Firearms in Hartford as a competitor of Colt? I waited on USFA to bring out a lower priced model and bought their Rodeo model as soon as it hit the market. I think I paid around $400 for mine and out of the box, it was and still is one of the most accurate firearms I’ve owned. Then we also had the Colt strike which lasted for an eternity.
Bought a Cowboy in 1998: still have it. Frailty? Thousands of rounds later I’m still waiting for something to break. Had an excellent trigger out of the box which it still has. Very accurate, still is. Worth every penny I paid for it. I remember the “experts” back than who said they wouldn’t work on them, inadequate this, inferior that, all rubbish. It was not as finely finished as a SAA at the time but it also did not need a trigger job out of the box like almost all SAA Colts do if you want to actually shoot them.
No it was not a Colt. I purchased one, barrel backed out and I sent it in. Rep stated it happens with the Cowboy. I got it back and sold it to buy a Ruger. Years later found out Uberti made the Cowboy, NOT Colt, they just branded them. So Ipaod over 700 for a Uberti with Colt’s name on it.
Comments are closed.